
Vicacopter – Open Flight Robotics
Source code and many notes used in Vicacopter, the 1st English language source code for a fully functional helicopter autopilot. This is that very copter that created a quadcopter craze in the DIY community long ago. Today we see many using and playing with quad-copters with camera as lithium battery development in portable devices pushed that technology up. We have many electric toys too today that depend on these light batteries.
Vicacopter – Open Flight Robotics
Vicacopter uses a ground computer for flight control. An 8 bit airborne microcontroller handles rate damping, PWM, & sensor capturing. The ground computer handles navigation & provides a simple instrument panel. This was the cheapest & most flexible way to fly. The system can be converted to a completely airborne autopilot very simply.
Some Features
- Automated landing & takeoff
- Sonar position sensing for indoor flight
- GPS position sensing for outdoor flight
- Ground station instrument panel
- Untethered communication from pilot to ground station
- Curved or linear paths
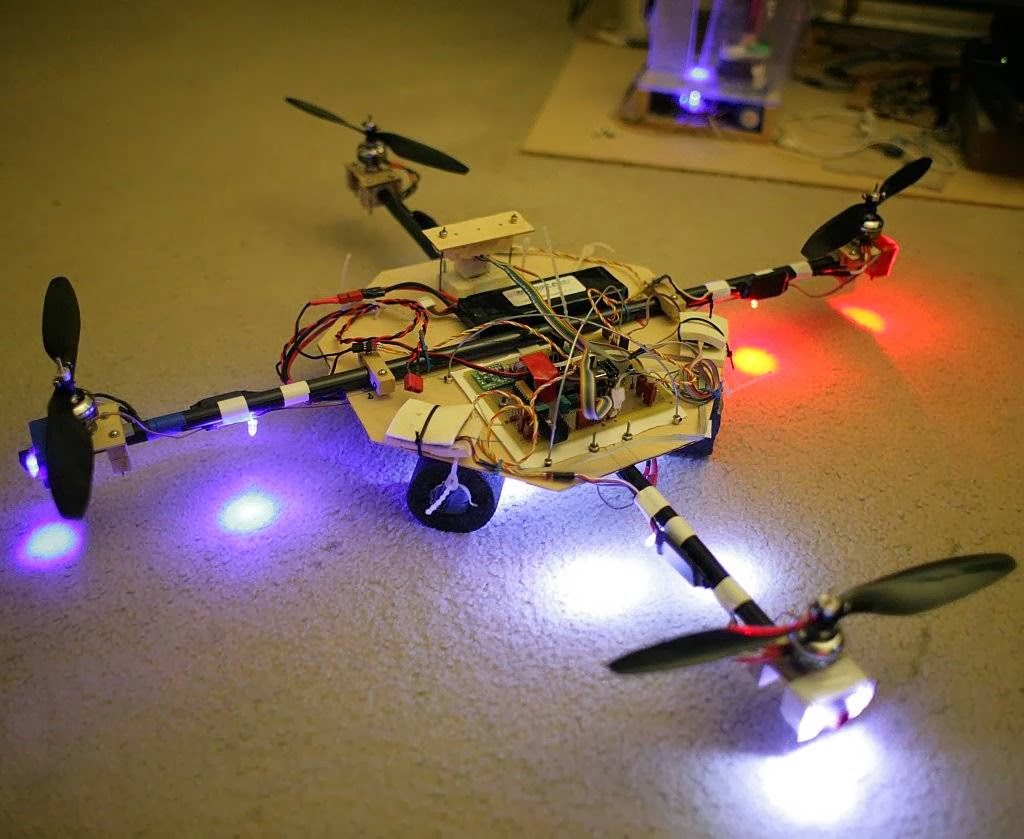
The Tri-Roter one used 3 gyros for short term rotation sensing, 2 accelerometers for long term tilt sensing, 3 magnetometers for long term heading sensing, a high quality GPS module for horizontal position, a barometer for altitude sensing. A 3rd accelerometer was too sensitive to vibration & altitude changes to be any good. Because of the long term sensors & the very stable gyros, the orientation was always pretty accurate & didn’t drift.

